Guía de los robots submarinos más clasificados de Rusia
Publicado: 27 jul 2018 03:04 GMT
https://actualidad.rt.com/actualidad/282972-robots-submarinos-clasificados-rusia
Les mostramos en este artículo los poderosos sumergibles desarrollados por encargo de la Marina de Guerra rusa
La Marina de Guerra rusa está potenciando sus capacidades no solo en buques de superficie y submarinos convencionales de varias clases, sino también mediante avanzados sistemas robóticos.
Con motivo de la fiesta del Día de la Armada que cada año se celebra el último domingo de julio, la agencia
TASS ha recopilados datos sobre los más desconocidos robots subacuáticos rusos, tanto los que están en funcionamiento como aquellos aún en desarrollo.
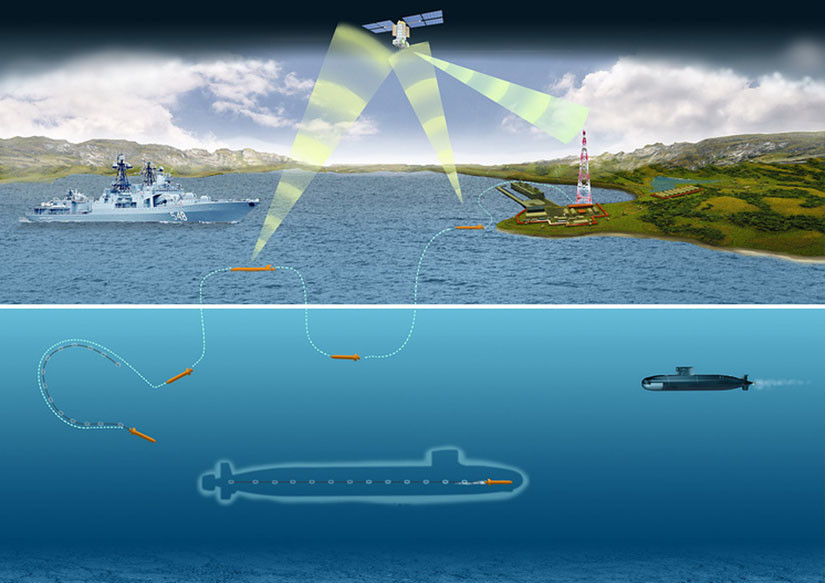
El dron submarino-torpedo Poseidón
El desarrollo del sistema subacuático parecido a un enorme torpedo y denominado Status 6 se conoció hace un par de años. Sin embargo, entonces la información no era oficial. La existencia de este proyecto fue 'oficializada' solo en febrero de este año en un mensaje del presidente Putin al Parlamento nacional.
El
Status 6, más tarde rebautizado como 'Poseidón', es un vehículo subacuático no tripulado calificado como un submarino-torpedo por su capacidad de destruir puertos y ciudades costeras. Puede recorrer hasta 10.000 kilómetros a velocidades de entre 60 y 70 nudos (de 110 a 130 km/h), y portar una carga nuclear de hasta 100 megatones.
De acuerdo al Ministerio de Defensa, ya se están realizando pruebas para verificar las características dinámicas del dron. Concretamente, las de navegación en condiciones reales se llevan a cabo de acuerdo con la planificación.
La idea de crear un arma de este tipo [curiosamente la promovió el futuro disidente y premio Nobel de Paz, el físico Andréi Sájarov] surgió en la década de 1950. En aquel entonces, el 'supertorpedo' se llamaba T-15, pero la tecnología de la época no permitió hacerlo realidad. Existe la teoría de que la prueba del arma nuclear más potente de la historia de la humanidad,
la bomba Zar (AN602), con una potencia de 51 megatones, fue llevada a cabo en 1961 en el marco del mismo proyecto.
El poder destructivo de una explosión submarina de este tipo en la costa del potencial enemigo sería completamente demoledor. Basta con decir que a 18,5 kilómetros del epicentro de la explosión se producirían olas de entre 101 y 228 metros, y ello sin tener en cuenta la contaminación radiactiva.
El elemento principal del robot, la planta de energía nuclear, gracias a la cual el dispositivo podrá moverse a una profundidad de más de un kilómetro y a gran velocidad, ya está probado.
К-433, uno de los submarinos del proyecto 667BDR Kalmar. / wikipedia.org / Mil.ru / CC BY-SA 4.0
Se trata de una estación nuclear de alta mar conocida también como AS-12 que fue desarrollada por ingenieros de la Oficina de Ingeniería Marítima de San Petersburgo Malajit a finales de los años 80.
Este discreto héroe de las profundidades tiene un diseño poco habitual: el casco fuerte de la nave, de acuerdo con fuentes abiertas, consiste en varias esferas de titanio conectadas entre sí y cubiertas con un casco exterior. Es esta forma es la que permite a la estación descender a una profundidad de 6.000 metros sin riesgo de ser aplastada por la columna de agua.
AS-12 es una nave subacuática tripulada. Su portador, según fuentes abiertas, es el submarino para 'misiones especiales' Orenburg, exsumergible portador de misiles balísticos de propulsión nuclear del proyecto 667BDR Kalmar, adscrito a la Flota del Norte.
En 2012, la Losharik participó en la expedición que precisó el límite de la plataforma continental rusa en el Ártico. La tripulación del AS-12 ayudó a los científicos en los rompehielos Kapitán Dranitsyn y Dikson a recoger muestras de suelo y rocas de fondo en la plataforma continental Mendeleev.
Los datos de que Losharik podría llevar algún arma no están disponibles: únicamente se conoce que los compartimientos donde se encontraban los torpedos y los misiles de Orenburg fueron desmontados.
Se informa que a día de hoy el aparato cumple misiones de investigación.
Klavesín-2R-PM
Klavesín-2R-PM / La Oficina Central de Diseño de Ingeniería Marina Rubín
El vehículo submarino deshabitado Klavesín-2R-PM está destinado a operaciones de búsqueda e investigación. La Marina lo está desarrollando a través de los ingenieros la oficina Rubin. El prototipo de la nave ya está construido y pronto se probará en el mar Negro.
Según el director general de esta oficina de diseño, Igor Vilnit, es un "aparato grande con amplias capacidades".
Al margen de las funciones de investigación y búsqueda, el "clavicémbalo" llevará a cabo tareas de estudio de los océanos en aguas profundas. La profundidad de inmersión del dispositivo alcanza los 6.000 metros y, además, el aparato no tiene restricciones en cuanto al aérea de navegación.
Yunona
El vehículo subacuático no tripulado Yunona se presentó por primera vez al público en general en 2015.
Está diseñado para estudiar la situación submarina, recopilar y transmitir información, trabajar en la plataforma continental del Ártico, cumplir misiones de búsqueda y rescate.
Además, Yunona podrá mapear el relieve del lecho marino e investigar la ubicación de los límites de temperatura en las profundidades acuáticas. Este robot está diseñado para funcionar a profundidades de hasta 1.000 metros y su autonomía alcanza las seis horas.
Simulador Surrogat ('sucedáneo')
También para la Armada rusa se ha creado un robot que puede simular cualquier submarino. Los especialistas de la Oficina Rubin ya han desarrollado un concepto-proyecto del sistema naval robótico marino Surrogat para ejercicios navales.
"El tamaño relativamente grande (eslora de unos 17 metros) y la capacidad de transportar antenas remolcadas para diversos propósitos permitirán reproducir de forma realista los campos físicos del submarino enemigo: acústico y electromagnético", señaló un portavoz de Rubin citado por TASS.
El Surrogat está equipado con una batería de iones de litio. Este simulador de submarino puede proporcionar ejercicios que duran hasta 15-16 horas, y todo este tiempo reproducirá las maniobras del submarino enemigo, también a altas velocidades.
El diseño modular del simulador permitirá cambiar su funcionalidad: el Surrogat podrá imitar tanto un submarino de propulsión nuclear como convencional, además de cumplir misiones de mapeo y reconocimiento.