-
Aviso de importancia, Reglamento del Foro actualizado. Reglas Técnicas, punto Q. Ir al siguiente link: Ver aviso
Estás usando un navegador obsoleto. No se pueden mostrar estos u otros sitios web correctamente.
Se debe actualizar o usar un navegador alternativo.
Se debe actualizar o usar un navegador alternativo.
Asuntos Aeroespaciales
- Tema iniciado KF86
- Fecha de inicio

SpaceX completa dos pruebas de fuego de los motores para su colosal cohete Starship (VIDEO)
Estos ensayos se realizan como parte de los preparativos para el tercer vuelo de prueba del cohete Starhsip, que tendrá lugar a principios del próximo año.
SpaceX completa dos pruebas de fuego de los motores para su colosal cohete Starship (VIDEO)
Publicado:31 dic 2023 03:24 GMT
Hola:
simplemente brutal

simplemente brutal
Por desgracia, parece que la misión Peregrine tuvo un ligero problema y parece seguro que no va a llegar a la Luna.

 www.space.com
www.space.com
 www.space.com
www.space.com
Private Peregrine moon lander suffers 'critical' fuel loss after launch, mission at risk
Peregrine likely won't be the first private spacecraft to touch down on the moon.
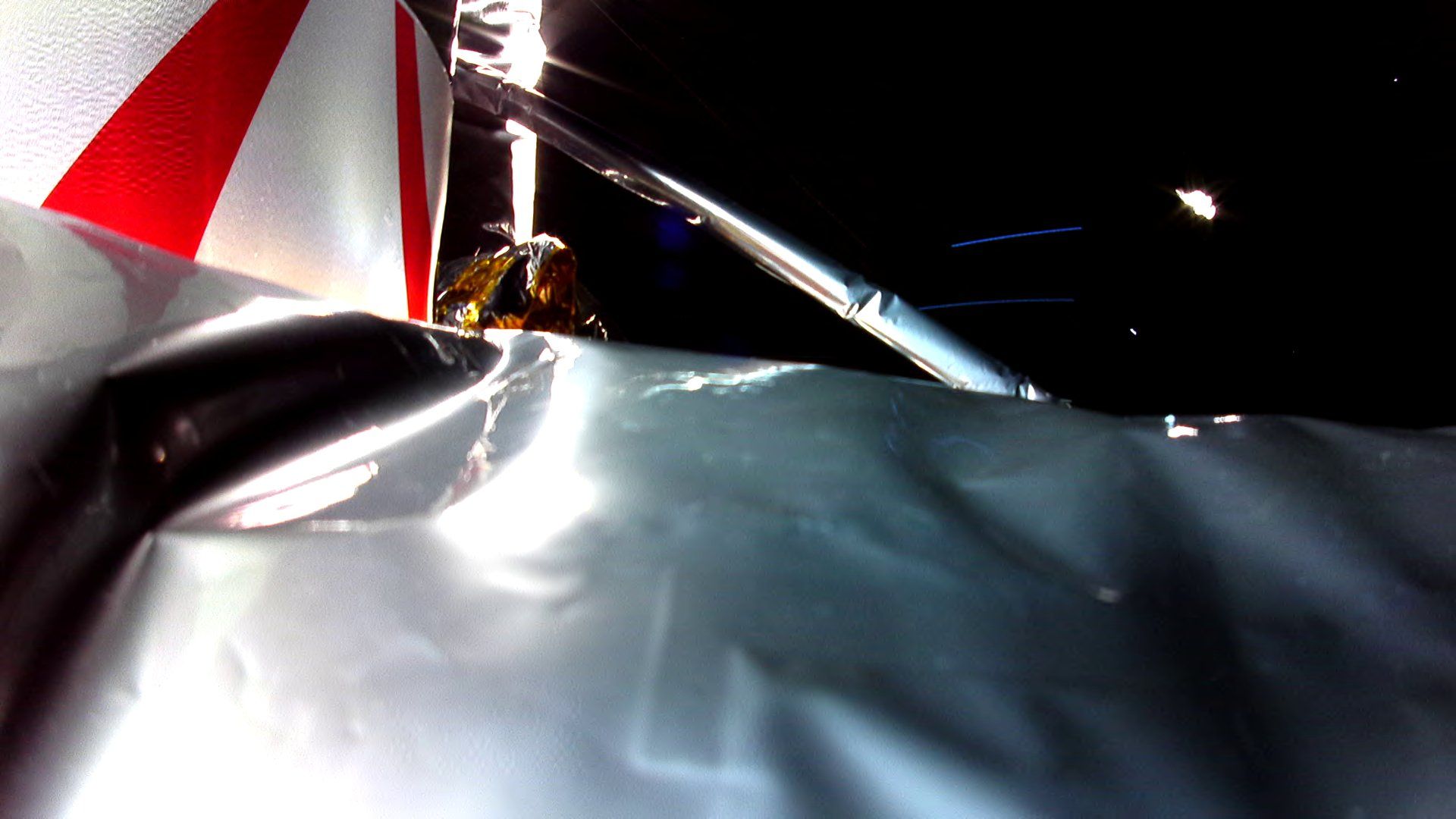
1st photo from crippled private Peregrine moon lander holds clue to anomaly
The image provides a visual clue that supports the Peregrine team's anomaly hypothesis.

La sonda solar india Aditya-L1 alcanza con éxito la órbita prevista
Su objetivo es "observar y comprender la dinámica cromosférica y coronal del Sol" de manera continua.
La sonda solar india Aditya-L1 alcanza con éxito la órbita prevista
Publicado:7 ene 2024 09:31 GMT
Desarrollan un motor de cohete que se "autoalimenta" con partes de su fuselaje (VIDEO)
Se tiene previsto que los científicos implementen un nuevo prototipo de mayor tamaño, el cual podría proporcionar hasta unos 1.000 newtons de empuje.
Desarrollan un motor de cohete que se "autoalimenta" con partes de su fuselaje (VIDEO)
Publicado:11 ene 2024 11:23 GMT
La Universidad de Glasgow informó este miércoles que un grupo de investigadores desarrolló un prototipo de motor de cohete con la capacidad de quemar su fuselaje para utilizarlo como combustible, lo que podría reducir tanto los costos de los lanzamientos como la acumulación de desechos espaciales.

Una empresa de EE.UU. creará un nuevo motor que promete realizar un vuelo a Marte en 2 meses
Actualmente se ha visto un incremento en la demanda diseñar cohetes pequeños y eficientes que permitan colocar en órbita pequeñas cargas útiles, como nanosatélites. De acuerdo con NewScientist, para que un cohete alcance una órbita predefinida, es necesario que eleve la masa de su estructura y de sus propulsores, así como la carga útil que transporta hacia el espacio.
Un cohete capaz de utilizar las piezas de su fuselaje como fuente de combustible requeriría de menos propelente en los tanques a bordo, por lo que la masa liberada podría asignarse para transportar más suministros y proyectos científicos importantes. Esta premisa también contribuiría a disminuir el problema de los desechos espaciales.
El concepto de motor de "autoconsumo" se propuso por primera vez en 1938, siendo patentado en ese mismo año. No obstante, nunca se llegó a construir un prototipo funcional, puesto que representaba un desafío implementarlo en los enormes cohetes en los que se han realizado la mayoría de los lanzamientos históricos.
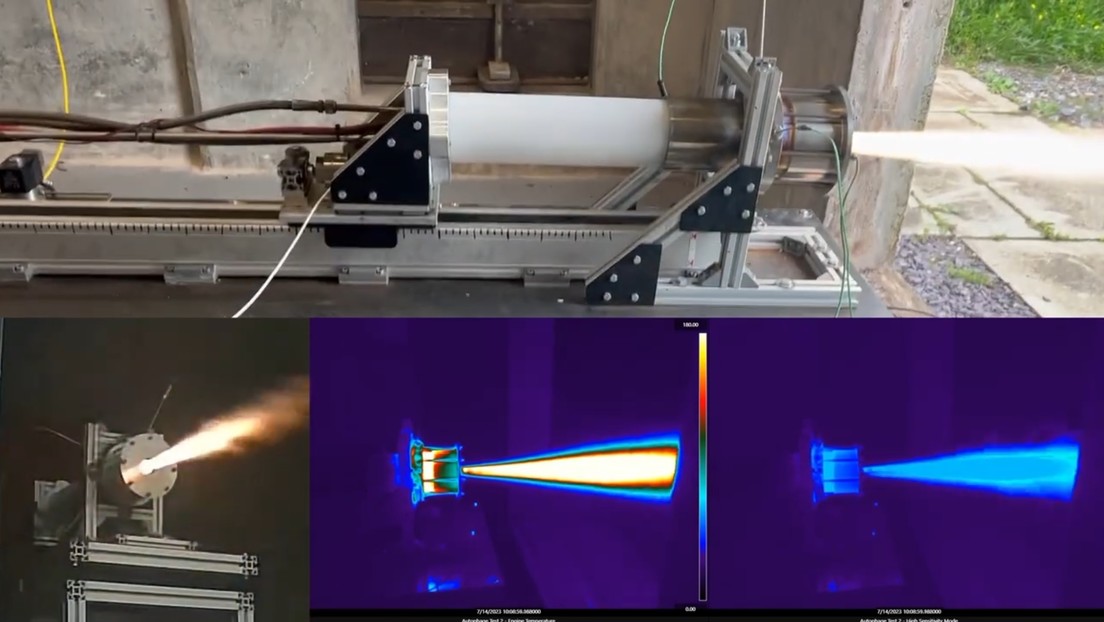
Probando la serpiente que se come su cola
En un artículo, recientemente presentado en el Foro SciTech en Florida, se indicaron los resultados obtenidos en las pruebas de fuego del primer motor "autofago", denominado 'Ouroborous-3' en honor al antiguo símbolo de una serpiente que se come su propia cola. "A medida que se queman los propelentes, quedan estos tanques vacíos donde se acumula toda esta masa estructural que no está siendo útil", indicó el científico Krzysztof Bzdyk, quien recalcó que el cohete ya no lleva "peso muerto", ya que los tanques fueron consumidos.Según los creadores del prototipo, a medida que el motor se calienta, se comienza a derretir la estructura del tanque del cohete, que es fabricado a partir de un tubo de plástico, con el fin de producir combustible. Posteriormente, el fluido resultante es introducido a la cámara de combustión del motor, junto con el propelente principal (una mezcla de oxígeno gaseoso y el propano líquido), proporcionando hasta una quinta parte de la cantidad total del combustible.
Se dio a conocer que el Ouroborous-3 produjo 100 newtons de empuje en una serie de experimentos controlados, que se realizaron en las instalaciones de la base aérea de Machrihanish, en Escocia. Esto es cuatro veces la fuerza que se necesita para romper un huevo.
Se tiene previsto que los científicos desarrollen un nuevo prototipo de mayor tamaño, el cual podría proporcionar hasta unos 1.000 newtons de empuje. Esto es alrededor de una sexta parte de lo que necesita un vuelo suborbital, y aproximadamente una vigésima parte de un vuelo orbital.
"A partir de aquí, comenzaremos a ver cómo podemos ampliar los sistemas de propulsión autofágica para proporcionar el empuje adicional necesario para que el diseño funcione como un cohete", subrayó Bzdyk. Por su parte, el investigador Jack Tufft señaló que su "objetivo es acercar el motor autofágico a un lanzamiento de prueba", ayudando de esta manera al "diseño para futuras generaciones de cohetes autofagos".
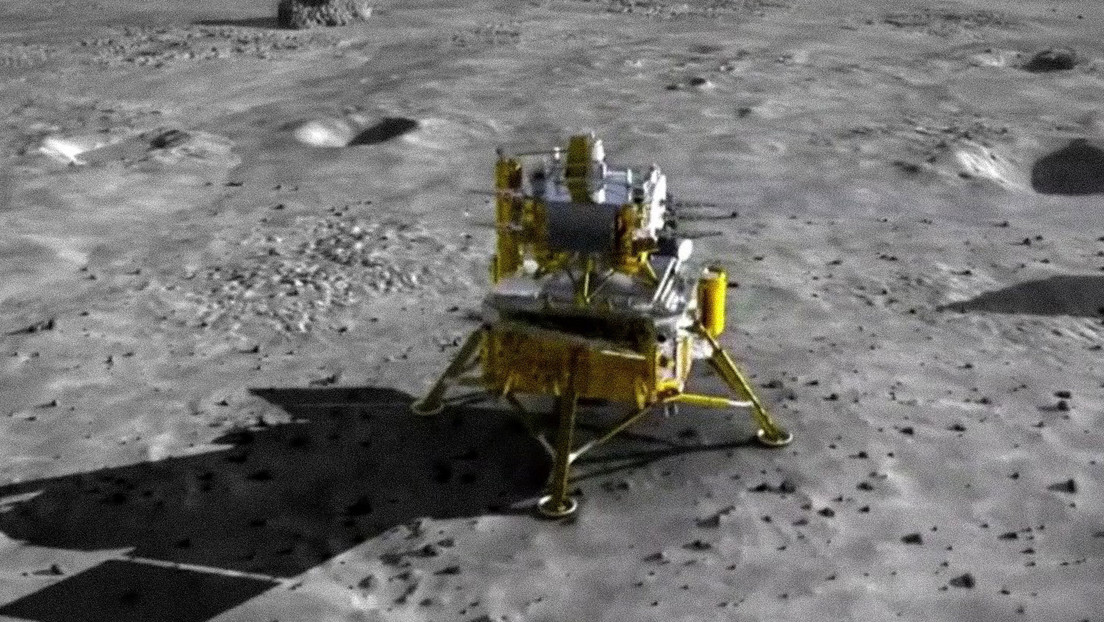
China lanzará una nueva sonda a la cara oculta de la Luna: ¿cómo y cuándo lo hará?
La misión Chang'e 6 tendrá como objetivo traer a la Tierra por primera vez en la historia muestras recolectadas del suelo del lado lejano de nuestro satélite natural.
China lanzará una nueva sonda a la cara oculta de la Luna: ¿cómo y cuándo lo hará?
Publicado:11 ene 2024 14:38 GMT
La Administración Espacial Nacional de China (CNSA), citada por la agencia Xinhua, anunció este miércoles que planea que el despegue de la sonda Chang'e 6, la próxima misión no tripulada del país asiático a la Luna, tenga lugar en el primer semestre de este año.
El organismo indicó que los componentes de la nave espacial arribaron al Centro de Lanzamiento Espacial de Wenchang, en la provincia de Hainan, y que el montaje y las pruebas del dispositivo se llevarán a cabo próximamente.
La misión Chang'e 6 forma parte de la cuarta fase del programa de exploración lunar chino. De acuerdo con medios estatales, al igual que su predecesora (Chang'e 5), estará conformada por un orbitador y un módulo de aterrizaje, así como por un módulo de ascenso y otro de reentrada.
Primera recolección de muestras del lado oculto de la Luna
Se detalla que el proceso operativo de la Chang'e 6 comenzará una vez que alcance la órbita lunar. En ese momento, se tiene planeado que sus cuatro componentes se separen en dos partes, con el orbitador y el módulo de reentrada permaneciendo en la órbita, mientras que el módulo aterrizaje y de ascenso descenderán suavemente en el lado oculto de la Luna.Una vez que concluyan las operaciones en la superficie, que incluyen la recolección de rocas y suelo lunar, el módulo de ascenso se elevará para acoplarse con el módulo de reentrada. Finalmente, se llevará a cabo el retorno a la Tierra de las muestras recolectadas.
En el pasado, Estados Unidos, la antigua Unión Soviética y China ya trajeron muestras lunares, pero la misión Chang’e 6 intentará lograr el primer retorno de muestras desde el lado oscuro del satélite natural de nuestro planeta. Se estima que las muestras recolectadas rondarán los 2.000 gramos, en comparación con los 1.731 que recuperó la Chang'e 5.
Pese a que el lado opuesto de la Luna ha sido fotografiado por diversas naves espaciales, ninguna otra había aterrizado en esa región hasta la misión Chang'e 4 en enero de 2019. En ese momento, la sonda china aterrizó en el cráter Von Karman, ubicado en la Cuenca de Aitken, en el polo sur lunar.
"Aterrizar una nave espacial en la superficie lunar nunca es fácil, pero siempre vale la pena intentarlo", afirmó el experto Pang Zhihao, quien recalcó que China cuenta "con toda la experiencia necesaria gracias al éxito de la misión Chang'e 5". No obstante, enfatizó que aterrizar "una sonda al otro lado [de la Luna] y traer muestras sigue siendo un desafío". "Después de todo, nadie lo ha intentado nunca", recalcó.
La CNSA apuntó asimismo que la Chang'e 6 transportará cargas útiles y proyectos satelitales de países como Francia, Italia y Pakistán, así como de la Agencia Espacial Europea (ESA).

VIDEO: Japón lanza un satélite espía para detectar misiles norcoreanos
Tokio pretende establecer una red de 10 satélites para detectar y proporcionar alerta temprana sobre posibles lanzamientos.
Japón lanza un satélite espía para detectar misiles norcoreanos
Publicado:12 ene 2024 10:31 GMT
La NASA lanza la misión espacial privada Ax-3 comandada por un español
Publicado:18 ene 2024 22:22 GMT
La misión Axiom Mission 3, de la compañía privada Axiom Space, ha despegado este jueves desde el Centro Espacial Kennedy de la NASA, en Cabo Cañaveral, rumbo a la Estación Espacial Internacional (EEI). Comandada por el astronauta español-estadounidense Michael López-Alegría, nacido en Madrid, la primera misión comercial totalmente europea —conformada por astronautas de Italia, Suecia y Turquía— se dedicará a labores de investigación.
El equipo de Ax-3 permanecerá en la EEI dos semanas y llevará a cabo más de 30 experimentos para mejorar nuestra comprensión de la fisiología humana en la Tierra y en órbita, así como también aportará avances científicos.

China ha lanzado desde un barco el cohete de combustible sólido más potente del mundo. Ha sido tan brutal como exitoso
Una empresa china llamada OrienSpace lanzó el jueves su cohete Yinli 1, conocido a este lado del mundo como Gravity-1. Es un lanzador particular por muchas...
 www.xataka.com
www.xataka.com
China ha lanzado desde un barco el cohete de combustible sólido más potente del mundo. Ha sido tan brutal como exitoso

Una empresa china llamada OrienSpace lanzó el jueves su cohete Yinli 1, conocido a este lado del mundo como Gravity-1. Es un lanzador particular por muchas razones, pero nos vamos a quedar con dos: se ha convertido en el cohete de combustible sólido más potente del mundo y lo han lanzado desde un barco.
Ha sido brutal. Miles de personas vieron el lanzamiento desde la costa de la ciudad de Haiyang, en la provincia de Shandong (al este de China). El Gravity-1 despegó desde la cubierta de un buque similar a un petrolero en el mar Amarillo. El encendido fue como una erupción volcánica: violenta, explosiva y con una gigantesca columna de gases.
El cohete tiene una altura modesta de 30 metros, pero se divide en tres etapas y es capaz de lanzar hasta 6,5 toneladas a la órbita baja terrestre. Las tres etapas son de combustible sólido. La primera lleva acoplados cuatro propulsores laterales que le dan un aspecto rechoncho a todo el conjunto.
Además del cohete de combustible sólido más potente en servicio, es —según OrienSpace— el único cohete de carga media con cuatro propulsores laterales, igualmente propulsados mediante combustible sólido.

Los motores de combustible sólido son más sencillos y baratos que los de combustible líquido, pero también tienen desventajas: no pueden reencenderse, no pueden ajustar la combustión para controlar el empuje y suelen liberar más partículas y gases nocivos en la atmósfera.
En este primer lanzamiento de prueba, Gravity-1 lanzó tres satélites meteorológicos que formarán parte de una constelación de 90 satélites de la empresa Yunyao Aerospace. El cohete los colocó con éxito en órbita polar.
En cuanto al barco, fue construido exclusivamente para lanzamientos espaciales y lo comparten varias empresas privadas y estatales. Tiene una eslora de 162 metros y una capacidad de carga de 22.000 toneladas. En las imágenes se puede ver que hay una trinchera o rampa deflectora de llamas bajo la plataforma de lanzamiento del cohete.
OrienSpace, fundada en 2020, planea enfocarse en el lanzamiento de constelaciones de satélites. Su próximo cohete, Gravity-2, tendrá una primera etapa de combustible líquido capaz de aterrizar, como el Falcon 9 de SpaceX. Con dos propulsores laterales de combustible sólido, podrá lanzar hasta 26 toneladas.
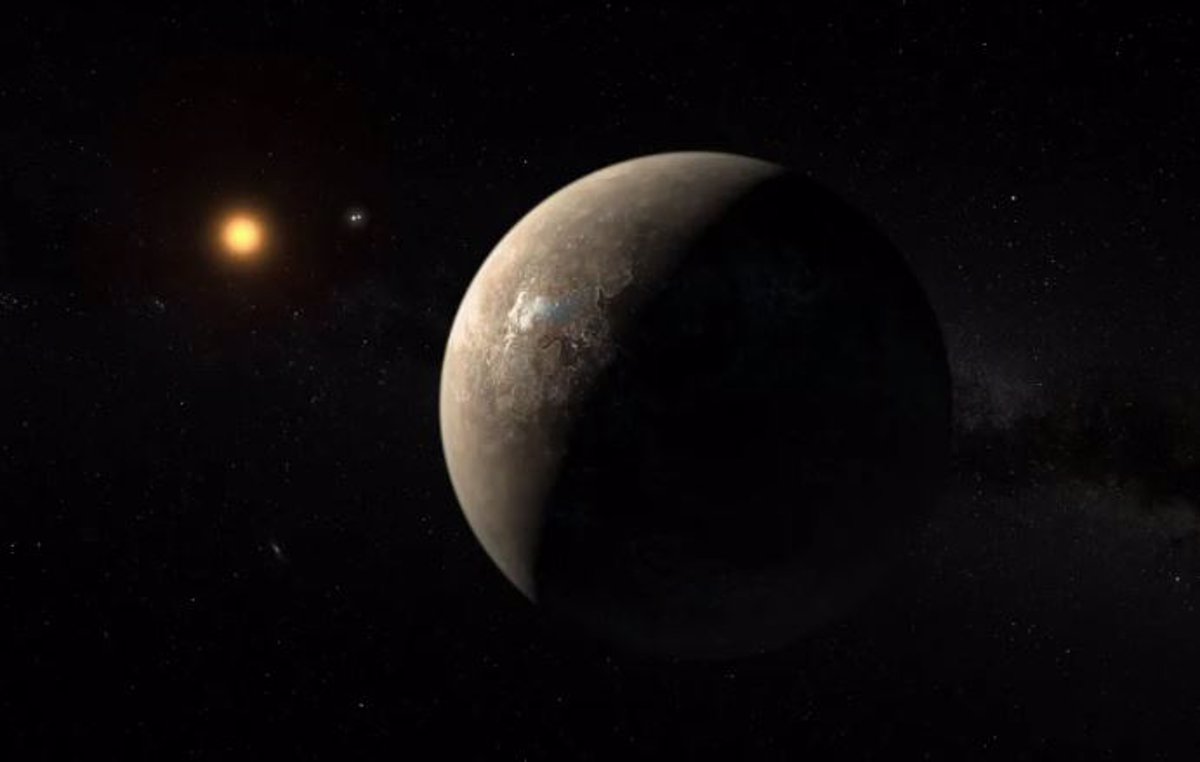
La NASA valora enviar un enjambre de diminutas naves a Próxima Centauri
La NASA ha seleccionado para desarrollo inicial un concepto de misión espacial basada en el envío de un...
La NASA valora enviar un enjambre de diminutas naves a Próxima Centauri
La NASA valora enviar un enjambre de diminutas naves a Próxima CentauriLa NASA ha seleccionado para desarrollo inicial un concepto de misión espacial basada en el envío de un enjambre de naves de unos gramos de peso a la estrella vecina Próxima Centauri.
Leer más: https://www.europapress.es/ciencia/...-centauri-20240109171446.html#google_vignette
(c) 2024 Europa Press. Está expresamente prohibida la redistribución y la redifusión de este contenido sin su previo y expreso consentimiento.
Hola:
ya lleva 72 vuelos
Realmente increible
ya lleva 72 vuelos
Realmente increible
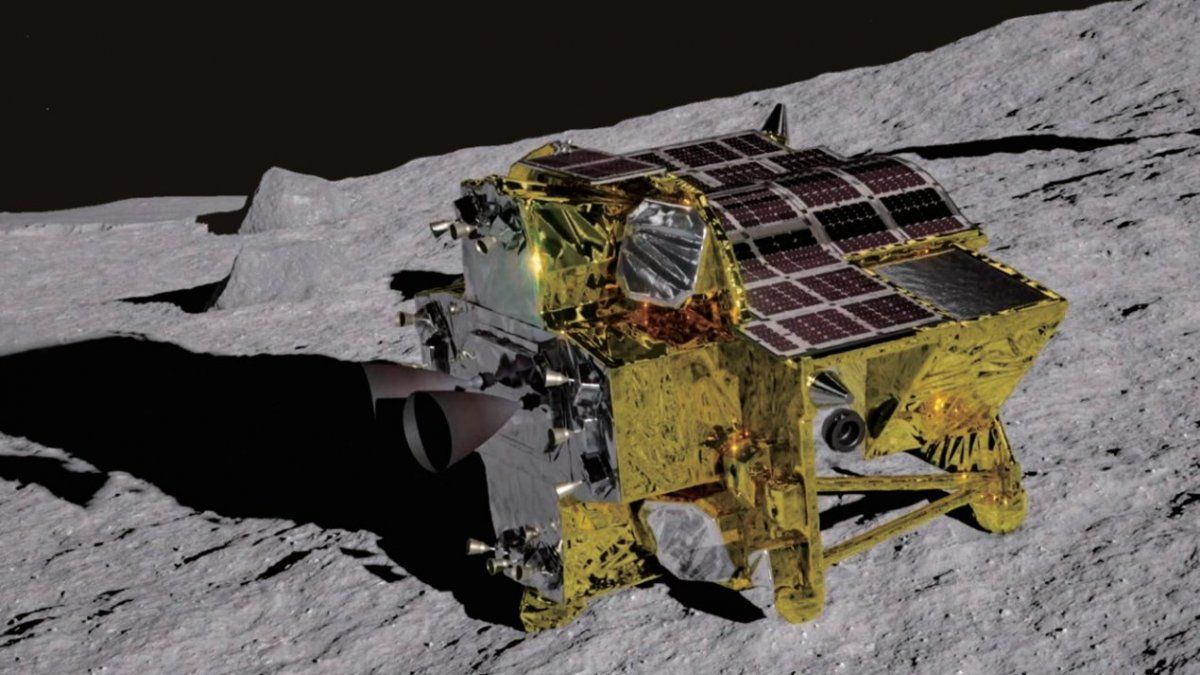
Japón logró aterrizar su sonda en la Luna, pero sus paneles solares perdieron energía
La particularidad de esta misión se centra en que el módulo de alunizaje japonés fue diseñado para hacerlo con una precisión sin precedentes.
 www-ambito-com.cdn.ampproject.org
www-ambito-com.cdn.ampproject.org
Japón logró aterrizar su sonda en la Luna, pero sus paneles solares perdieron energía
Hola:
ya lleva 72 vuelos
Realmente increible
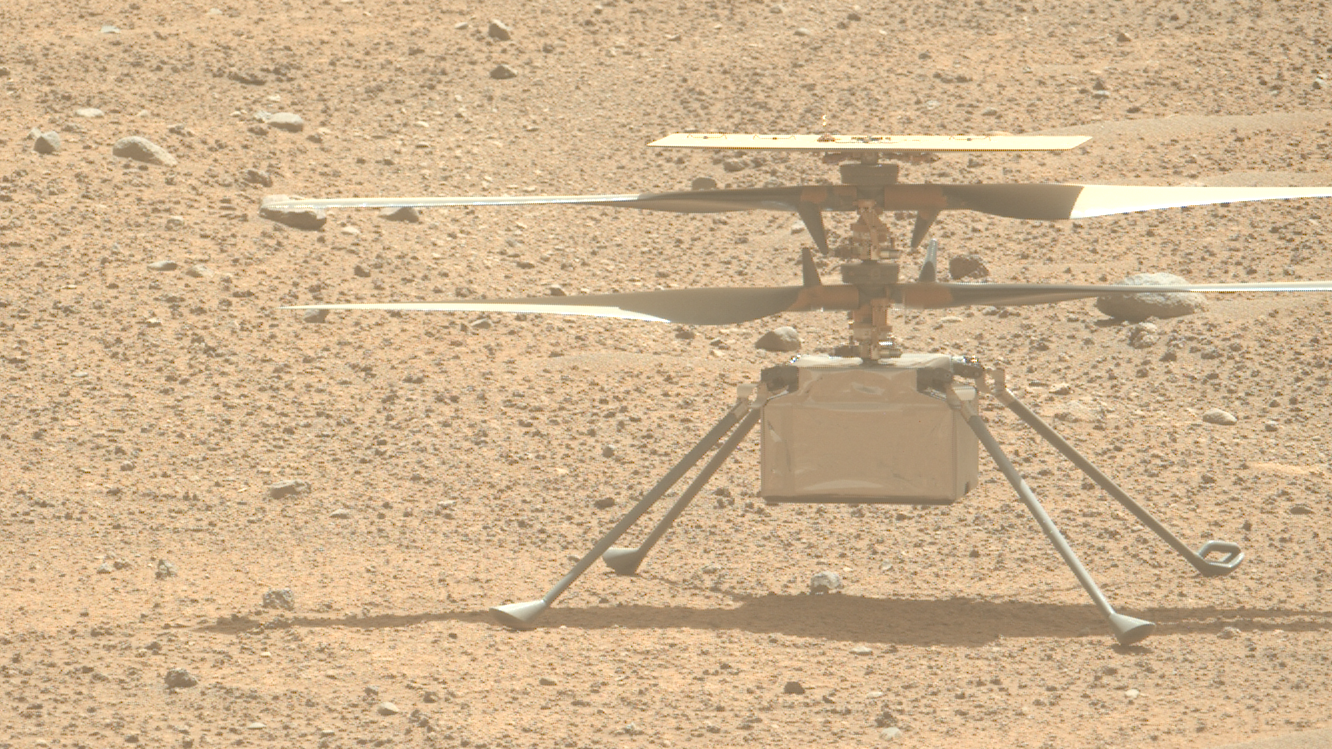
NASA loses contact with Ingenuity Mars helicopter
The dropout occurred on Thursday (Jan. 18), during Ingenuity's 72nd Red Planet flight.
La NASA pierde contacto con el helicóptero Ingenuity Mars
NoticiasPor Mike Wall
publicadoHace 1 día
El abandono se produjo el jueves (18 de enero), durante el vuelo número 72 del Planeta Rojo de Ingenuity.
La NASA restablece la comunicación con el helicóptero Ingenuity en Marte
La NASA restablece la comunicación con el helicóptero Ingenuity en Marte
Publicado:22 ene 2024 16:01 GMT

Entra en funcionamiento un satélite hiperespectral chino: ¿para qué servirá?
Los datos proporcionados por Gaofen-5 01A contribuirán a los esfuerzos para la protección del medioambiente y la reducción de contaminantes.
Entra en funcionamiento un satélite hiperespectral chino: ¿para qué servirá?
Publicado:24 ene 2024 10:26 GMT
La Administración Espacial Nacional de China (CNSA) anunció este miércoles que ha entrado en funcionamiento el satélite de teledetección Gaofen-5 01A, diseñado para el monitoreo hiperespectral de la atmósfera, el agua y el suelo terrestre desde el espacio, recoge la agencia Xinhua.
El vehículo espacial fue lanzado en diciembre de 2022, a bordo de un cohete Gran Marcha 2D desde el Centro de Lanzamiento de Satélites de Taiyuan, en la provincia china de Shanxi. Actualmente, el Gaofen-5 01A se desplaza en una órbita heliosíncrona, a una altura de 705 kilómetros sobre la Tierra.
De acuerdo con la CNSA, el satélite está equipado con diversos tipos de instrumentos científicos, incluidos un generador de imágenes infrarrojas térmicas amplias, una cámara hiperespectral infrarroja de onda corta a visible y un espectrómetro para gases traza atmosféricos. Estas herramientas mejorarán la capacidad del Gaofen-5 01A para el seguimiento de parámetros ambientales y de gestión de recursos naturales.
Por su parte, el director del Sistema de Observación de la Tierra y Centro de Datos de la CNSA, Zhao Jian, detalló que la información obtenida del satélite contribuirá a los esfuerzos para la protección del medioambiente y la reducción de contaminantes. Asimismo, mencionó que el vehículo espacial ha logrado una cobertura global para el estudio de la atmósfera una vez al día, así como una cobertura del entorno de la superficie terrestre una vez cada dos días.
Hasta este martes, el Gaofen-5 01A había enviado aproximadamente 245 terabytes de datos recopilados hacia la Tierra, que incluían casi 86.000 imágenes de teledetección, reportó Space Daily. Esta cantidad de información, además de probar la capacidad técnica del satélite, también demuestra su potencial para la observación y gestión ambiental.
El Gaofen-5 01A pertenece a la serie de satélites civiles chinos de teledetección del programa Gaofen, que inició operaciones en mayo de 2010. Esta iniciativa se ha convertido en la red del sistema de observación terrestre de alta resolución de China. Hasta el momento, alrededor de 20 satélites se encuentran en servicio bajo este programa.
Logró fotografiar y transmitir datos del Small Lunar Landing Demonstrator (SLIM) utilizando un robot de superficie lunar deformable.
25 de enero de 2024 (Reiwa 6)Agencia Nacional de Investigación y Desarrollo Agencia de Exploración Aeroespacial de Japón
Takara Tomy
Sony Group
Doshisha University Co., Ltd.
Agencia de Exploración Aeroespacial de Japón (Presidente: Hiroshi Yamakawa), Takara Tomy Corporation (Presidente y Director de Operaciones: Kazuhiro Kojima), Sony Group Corporation (Representante Ejecutivo, Presidente y Director Ejecutivo: Kenichiro Yoshida), Universidad de Doshisha ( El robot lunar deformable (Vehículo de excursión lunar) 2 (LEV-2), apodado "SORA-Q", en adelante "LEV-2"), desarrollado conjuntamente por cuatro partes, incluido el presidente de la Universidad Asako Ueki, es un pequeño ,vehículo *2 fue fotografiado con éxito. Como resultado, LEV-2, junto con el vehículo de exploración lunar ultrapequeño (Lunar Excursion Vehicle 1 (LEV-1), en lo sucesivo denominado "LEV-1") * 3 , se convierte en el primer *4 robot de exploración de la superficie lunar de Japón. , y los primeros * 4 robots completamente autónomos del mundo para explorar la luna, y la primera * 4 exploración simultánea de la superficie lunar del mundo por parte de múltiples robots. Además, LEV-2 se ha convertido en el robot de exploración de la superficie lunar *4 más pequeño y ligero del mundo .
LEV-2 se cargó en SLIM junto con LEV-1, y el 20 de enero de 2024, fue expulsado a la superficie lunar junto con LEV-1 justo antes de que SLIM aterrizara. Después de eso, LEV-2 tomará fotografías del SLIM y el entorno circundante, y las imágenes se transmitirán al suelo utilizando el dispositivo de comunicación de LEV-1 y se liberarán.

Imagen de la superficie lunar tomada y transmitida por LEV-2 "SORA-Q"
(Crédito: JAXA/Takara Tomy/Sony Group Corporation/Doshisha University)
Esta imagen es una prueba de transmisión de datos de ondas de radio de las estaciones de radio LEV-1 y LEV-2. la imagen de prueba obtenida por.
Esta imagen fue transferida a tierra a través de LEV-1 y se confirmó que la función de comunicación entre LEV-1 y LEV-2 estaba funcionando normalmente. Además, dado que LEV-2 se deformó desde su estado esférico en su estado almacenado, también pudimos confirmar que se desplegó e impulsó con éxito en la superficie lunar después de ser liberado de SLIM. Además, bajo control autónomo, LEV-2 utilizó un algoritmo de procesamiento de imágenes para seleccionar imágenes de alta calidad que estaban dentro del campo de visión del SLIM entre múltiples imágenes tomadas usando su cámara óptica incorporada, y luego las envió.
Actualmente estamos analizando otros datos, incluidos los registros de conducción, y planeamos publicar los resultados en el futuro.
*Comentarios de los involucrados
<Director del Centro de Innovación de Exploración Espacial JAXA, Kazuyuki Funaki>
El LEV-2 "SORA-Q", que fue desarrollado combinando tecnología de juguetes, la última tecnología en robótica de sensores y la tecnología espacial de JAXA, y tiene excelentes características de operación y movimiento autónomos, ha sido anunciado como el mundial como el más pequeño y el primero de Japón. robot lunar, pudimos capturar con éxito imágenes SLIM, un logro importante. Nos gustaría expresar nuestro profundo agradecimiento a todas las empresas e instituciones que participaron en nuestra investigación y desarrollo, y a las muchas personas que brindaron apoyo y apoyo.Este año se cumple el décimo aniversario desde que el Centro de Innovación en Exploración Espacial colaboró con empresas de todo Japón y comenzó la investigación y el desarrollo dirigidos a la Luna. Se están desarrollando muchas nuevas tecnologías de exploración de la superficie lunar exclusivas de Japón, y es el comienzo de una nueva era lunar, con expectativas de éxito de Japón después de LEV-2.
<Kintaro Toyama, presidente y director representante, Takara Tomy Co., Ltd.>
Estoy muy contento de que el LEV-2 SORA-Q haya podido hacer una contribución importante a la misión de alunizaje preciso del pequeño demostrador de alunizaje SLIM. Con esto, SORA-Q se convirtió en el primer robot japonés en aterrizar en la luna y tomar fotografías. Este éxito se debe a todos los involucrados y a todos los que nos apoyaron mientras perseguíamos nuestros sueños juntos. Gracias desde el fondo de mi corazón.Espero que el éxito de este proyecto SORA-Q inspire a niños de todo el mundo a interesarse por las ciencias naturales y, al mismo tiempo, espero que el éxito de este proyecto SORA-Q despierte el interés por las ciencias naturales. , así como la importancia de asumir desafíos difíciles y nuevos, así como sueños y esperanzas, esperamos que esto te dé la oportunidad de creer en el poder que tienes para crear tu propio futuro.
En este año conmemorativo, que marca el centenario de nuestra fundación, estamos orgullosos de que la tecnología de juguetes con la que nos ganamos la vida haya jugado un papel en este gran logro, y continuaremos asumiendo nuevos desafíos comenzando con Asobi. .
<Satoshi Natsume, director general del grupo de implementación exploratoria de plataforma tecnológica de Sony Group Corporation>
Nos sentimos honrados de haber participado en el desarrollo conjunto de un robot lunar transformable y de haber completado con éxito una misión de exploración en la superficie lunar.En esta investigación conjunta, nuestra empresa tomó la iniciativa en el desarrollo de un sistema de control y tecnología de procesamiento de imágenes para un robot lunar utilizando la placa SPRESENSETM de Sony Semiconductor Solutions equipada con un procesador de detección inteligente para IoT. Creemos que a través de nuestra investigación conjunta pudimos demostrar la posibilidad de utilizar dispositivos de consumo en el duro entorno del espacio, lo cual es un logro importante. El Grupo Sony continuará creando activamente nuevas tecnologías y explorando sus aplicaciones potenciales, incluso en el espacio, y contribuirá a la investigación y el desarrollo que contribuyan a la evolución de nuestra civilización y la sostenibilidad de nuestro planeta.
<Kitaka Watanabe, Profesor, Facultad de Ciencias Biomédicas, Universidad de Doshisha>
Estoy muy feliz y agradecido de haber participado en el proyecto Small Lunar Lander Demonstrator SLIM, y de que SORA-Q, resultado de una investigación conjunta entre cuatro partes, haya logrado la adquisición de imágenes de la superficie lunar. SORA-Q es muy pequeña, mide 80 mm, pero creo que esta pequeña partícula contribuirá en gran medida al futuro desarrollo espacial. Doshisha celebrará su 150 aniversario el próximo año. Seguiremos asumiendo nuevos retos.*1
JAXA está desarrollando "tecnología de control y tecnología de robots pequeños" en el "Proyecto de apoyo a la construcción del centro de innovación" (un centro de innovación abierto destinado a ampliar las áreas de actividad y supervivencia humana mediante la exploración de las fronteras del sistema solar) encargado por la Agencia de Ciencia y Tecnología de Japón. En 2016 se firmó un acuerdo conjunto con Takara Tomy.
*2
Una pequeña nave espacial que demuestra la tecnología de aterrizaje de alta precisión necesaria para la futura exploración lunar y planetaria. Al demostrar esta tecnología, la exploración de los cuerpos celestes gravitacionales por parte de la humanidad tiene como objetivo "salir donde uno quiere salir", en lugar de la exploración convencional de "salir donde es fácil salir".
*3
Una pequeña sonda montada en SLIM explorará de forma autónoma la superficie lunar saltando después de ser lanzada sobre la superficie lunar.
※Cuatro
Según una investigación de JAXA. Al 25 de enero de 2024.
Temas similares
- Respuestas
- 0
- Visitas
- 295
- Respuestas
- 3
- Visitas
- 442
- Respuestas
- 4
- Visitas
- 349
- Respuestas
- 84
- Visitas
- 3K