Estás usando un navegador obsoleto. No se pueden mostrar estos u otros sitios web correctamente.
Se debe actualizar o usar un navegador alternativo.
Se debe actualizar o usar un navegador alternativo.
Monografico: Kfir
- Tema iniciado michelun
- Fecha de inicio
















Accidente Kfir 737
El 3 de diciembre de 1975, el Kfir 737 del Escuadrón 101 volvía de una misión de entrenamiento a base de Hatzor. Durante la aproximación final del aterrizaje se produjo en la aeronave un fallo de funcionamiento en el controlador de temperatura del motor que provocó que las persianas del tubo de escape se abrieran hasta el final y perdieran empuje instantáneo. El piloto de reserva Mayor Michael Tzuk decidió abandonar la aeronave, pero debido a una falla en asiento eyector MB, la secuencia de eyección se interrumpió y el piloto no pudo salir del aparato, aunque si se desplegó el paracaídas del asiento.

Luego de culminar la investigación del accidente, y como parte del proceso de lecciones aprendidas, se desarrolló en el país un nuevo controlador de temperatura digital, y luego de una serie de experimentos, se reemplazó el controlador original por los motores J-79 de los Kfir y F-4E Kurnas del FDI.
También se detectó una falla de diseño por parte del fabricante Martin Backer, por lo que se emitió una orden de modificación técnica para modelo JM-6 de la aeronave Kfir, en la cual se extrajo el pasador de fijación de la varilla del asiento eyector. La varilla se fija mediante un tornillo y una tuerca autoblocante.
A fines de 1978, la Fuerza Aérea Alemana se acercó a la Fuerza Aérea Israelí con una propuesta para reunirse y discutir la confiabilidad del controlador de temperatura del motor J-79. El controlador es responsable de determinar la temperatura del motor de acuerdo con los modos de funcionamiento del mismo.
Este controlador era común tanto en los aviones Kfir como en los F-4E Phantom Kurnas y en los F-104 Starfigther. Los alemanes tenían problemas de confiabilidad y muchas fallas de sus flotas de ambos modelos(F-4F y F-104).
Estaban particularmente preocupados por las continuas fallas que se daban, pero en particular con los accidentes del F-104, que era un avión monomotor.
En la FDI se utilizaba el mismo motor en las flotas de Kfir y Kurnas, y al igual que con los alemanes presentaba problemas de baja confiabilidad, alto costo de mantenimiento y escasez de repuestos. El problema de fiabilidad se descubrió en toda su gravedad en 1975 tras una avería en el controlador de temperatura del motor del avión Kfir que provocó el accidente en el que falleció el piloto(accidente Kfir 737).
Relata Avraham Shachak:
En ese momento, yo era oficial en la sede a cargo de los sistemas de energía del avión Kurnas. Volé a Alemania y me reuní con personal alemán de la Fuerza Aérea Alemana y descubrí que no tenían información que pudiera ayudarnos a resolver los problemas que ocasionaba el controlador en amabas flotas de aparatos.
Cuando regresé a Israel, me ofrecí a realizar una investigación en profundidad para averiguar cuál era el problema real con el controlador de temperatura de los J-79.
Fui a la sección del taller donde se recorría el controlador (entonces en IAI) y junto con su ingeniero investigamos varias docenas de controladores defectuosos que habían llegado para reparar. Al final de la investigación (mayo de 1979), redacté un informe que detallaba los hallazgos y recomendaciones para resolver los problemas descubiertos.
Al resumir el informe, argumenté que el controlador analógico adolece de problemas que, en mi opinión, no tienen posibilidad de solucionarse.
Recomendé desarrollar un nuevo controlador digital que incluyera dos canales de control idénticos (el antiguo controlador tenía un solo canal sin respaldo y como el Kfir es un avión monomotor, recomendé dos canales). Desafortunadamente, las FDI no actuaron para implementar las recomendaciones y el informe se incluyó en uno de los archivos y se olvidó.
En 1980 me asignan al puesto de Oficial de mantenimiento en la línea F-16.
Un día de 1982, dos personas que no conozco llegaron a la sección donde estábamos sentados. Vinieron a reunirse con un joven oficial de la tripulación F-16 que tenía un papel secundario, también a cargo de un avión Tsukit (una versión mejorada del Magister). El oficial llegó muy tarde a la reunión. Mientras tanto hablé con ellos y resultó que tienen una empresa en el país que desarrolló un controlador digital para el motor del avión Tsukit.
Durante nuestra conversación recordé el informe que había escrito 3 años antes sobre el controlador para el J-79. Tomé el informe olvidado y se lo entregué para que lo leyeran y les pedí su opinión. Después de una breve revisión me pidieron llevarlo a la empresa y revisarlo a fondo y por supuesto devolvérmelo.
Dos semanas después llamaron: ¡Queremos desarrollar el controlador digital que recomendó a nuestra costa! (Suponiendo que si tienen éxito, la IAA comprará su proyecto). No lo creí: hicieron un movimiento que no se me ocurrió en absoluto cuando les entregué el informe para su revisión.
En poco tiempo, la empresa inició un proceso de desarrollo en colaboración con la FDI, que duró varios años, al final del cual se desarrolló un controlador avanzado basado en computadora que incluye dos canales de control (el segundo para respaldo en caso de una falla en el primero).
La FDI adquirió el nuevo controlador y lo instaló en los motores de los aviones Kfir y Kurnas.
Con el correr de los años,el mismo controlador fue exportado a ocho Fuerzas Aérea, que utilizaban tanto F-4, como Kfir.
En 1984 soy destinado al proyecto Lavi y me encontré frente a la misma empresa (que desarrolló el controlador para el J-79) que ahora desarrollaba productos para el nuevo aparato de los cuales yo era responsable de la dirección.
En 1988, cuando me retiré de la Fuerza Aérea, me sorprendí cuando se me acercaron y me ofrecieron un trabajo en su compañía (supongo que por mi relación temprana conmigo).
Acepté y me quedé a trabajar con ellos hasta 2010. En mi trabajo en la empresa, fui socio en el desarrollo posterior del controlador como ingeniero de sistemas.
En 2004 fui enviado por la compañía a Corea del Sur, planificando la instalación del controlador en los motores J-79 de los Phantom de la Fuerza Aérea Coreana.
También instruí a los técnicos sobre cómo manejar el nuevo controlador. Esta fue la última actividad del proyecto que en realidad comenzó en 1978 en una reunión con la Fuerza Aérea Alemana.
Como parte de mi trabajo en la misma empresa, inicié una serie de proyectos adicionales para aviones F-16 y F-4 que se crearon con la misma idea en mente; reemplazar un sistema existente con un sistema mejorado, lo que aumentaría la confiabilidad y ahorraría costos de mantenimiento.
En total, los sistemas se instalaron en aeronaves de 26 fuerzas aéreas del mundo.
Principales diferencias entre el nuevo controlador de temperatura y el controlador original.

El controlador analógico original
El controlador original estaba basado en electrónica analógica básica, con componentes de la década de 1960. La estructura interna incluía cinco circuitos electrónicos, cada uno cubierto con un encapsulado sólido, que formaba un cubo opaco desde el cual se conectaban los cables al resto de los circuitos
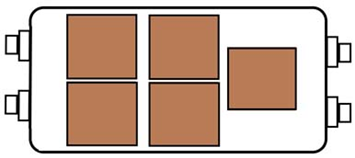
La estructura interna del antiguo controlador
El inspector no tenía ni un sistema de autodiagnóstico ni un registro de fallas. La detección de fallas del motor solo era posible cuando un piloto o técnico detectaba un mal funcionamiento del motor en vuelo o en tierra. La verificación de fallas no fue posible a nivel Escuadrón y el controlador se enviaba al nivel 4 (en IAI), lo que aumentó el costo de mantenimiento y requería una gran cantidad de controladores de repuesto.
Localizar una falla en el controlador era complicado y largo, ya que los componentes internos no se podían verificar en ningún circuito electrónico (porque todos están cerrados en cubos sólidos). La única forma de encontrar fallas era reemplazar aleatoriamente uno de los bloques (lo que costaba varios miles de dólares). Si no se soluciona la falla, se reemplaza otro cubo y así sucesivamente hasta que se subsanaba la falla. Un método costoso e ineficiente.
En el caso de reemplazar el controlador del motor, fue necesario regular la temperatura del motor. Para ello, un técnico tenía que entrar durante el funcionamiento debajo del motor y realizar la regulación con un destornillador a través de una abertura en el controlador. Los datos del motor se podían leer en los indicadores de la cabina.
El nuevo controlador - DTCA (Amplificador de control de temperatura digital)

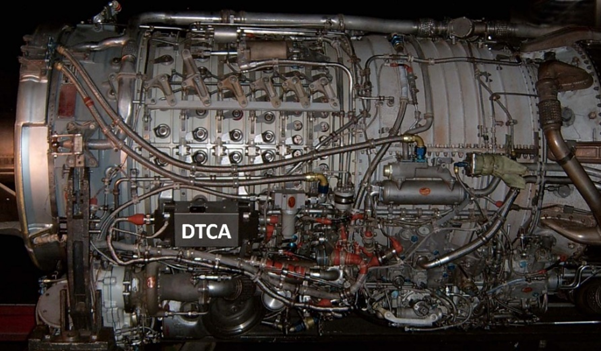
El nuevo controlador está montado en un motor J-79
El nuevo controlador se compone de electrónica digital avanzada y está controlado por una computadora (microprocesador). El controlador incluye 3 modernas tarjetas electrónicas.
Para verificar el funcionamiento del motor, se conecta una computadora portátil a un controlador a través de un cable de comunicación. Todos los datos del motor se muestran claramente en tiempo real en un monitor.
El controlador tiene un sistema de autoprueba que revisa los sistemas del controlador y el sistema del motor. En caso de mal funcionamiento, se registra inmediatamente en la memoria interna y se puede recuperar en la computadora externa y mostrar en la pantalla.
En caso de falla en el controlador, las tarjetas se pueden retirar en el laboratorio y cada componente se revisa por separado, y si se encuentra una falla, se puede reemplazar sin dañar la tarjeta. La solución de problemas es muy simple y rápida, por lo que el costo de mantenimiento es bajo.
El proceso de regulación de la temperatura del motor en marcha se realiza directamente en el calculador externo y no en el controlador (y sin tener que acercarse al motor como en el caso del controlador original). Para regular la temperatura, se usan las flechas en pantalla (flecha hacia arriba para aumentar la temperatura y flecha hacia abajo para disminuir). Simple y fácil de realizar.
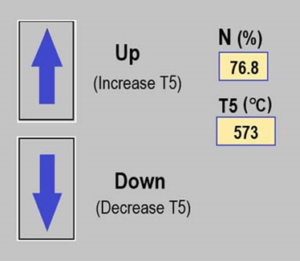
Regulación de la temperatura del motor en la pantalla de la computadora
El 3 de diciembre de 1975, el Kfir 737 del Escuadrón 101 volvía de una misión de entrenamiento a base de Hatzor. Durante la aproximación final del aterrizaje se produjo en la aeronave un fallo de funcionamiento en el controlador de temperatura del motor que provocó que las persianas del tubo de escape se abrieran hasta el final y perdieran empuje instantáneo. El piloto de reserva Mayor Michael Tzuk decidió abandonar la aeronave, pero debido a una falla en asiento eyector MB, la secuencia de eyección se interrumpió y el piloto no pudo salir del aparato, aunque si se desplegó el paracaídas del asiento.
Luego de culminar la investigación del accidente, y como parte del proceso de lecciones aprendidas, se desarrolló en el país un nuevo controlador de temperatura digital, y luego de una serie de experimentos, se reemplazó el controlador original por los motores J-79 de los Kfir y F-4E Kurnas del FDI.
También se detectó una falla de diseño por parte del fabricante Martin Backer, por lo que se emitió una orden de modificación técnica para modelo JM-6 de la aeronave Kfir, en la cual se extrajo el pasador de fijación de la varilla del asiento eyector. La varilla se fija mediante un tornillo y una tuerca autoblocante.
Desarrollo de un nuevo controlador de temperatura para el motor J-79 de aeronaves Kfir y Kurmas de la FDI.
Por Avraham Shachak.A fines de 1978, la Fuerza Aérea Alemana se acercó a la Fuerza Aérea Israelí con una propuesta para reunirse y discutir la confiabilidad del controlador de temperatura del motor J-79. El controlador es responsable de determinar la temperatura del motor de acuerdo con los modos de funcionamiento del mismo.
Este controlador era común tanto en los aviones Kfir como en los F-4E Phantom Kurnas y en los F-104 Starfigther. Los alemanes tenían problemas de confiabilidad y muchas fallas de sus flotas de ambos modelos(F-4F y F-104).
Estaban particularmente preocupados por las continuas fallas que se daban, pero en particular con los accidentes del F-104, que era un avión monomotor.
En la FDI se utilizaba el mismo motor en las flotas de Kfir y Kurnas, y al igual que con los alemanes presentaba problemas de baja confiabilidad, alto costo de mantenimiento y escasez de repuestos. El problema de fiabilidad se descubrió en toda su gravedad en 1975 tras una avería en el controlador de temperatura del motor del avión Kfir que provocó el accidente en el que falleció el piloto(accidente Kfir 737).
Relata Avraham Shachak:
En ese momento, yo era oficial en la sede a cargo de los sistemas de energía del avión Kurnas. Volé a Alemania y me reuní con personal alemán de la Fuerza Aérea Alemana y descubrí que no tenían información que pudiera ayudarnos a resolver los problemas que ocasionaba el controlador en amabas flotas de aparatos.
Cuando regresé a Israel, me ofrecí a realizar una investigación en profundidad para averiguar cuál era el problema real con el controlador de temperatura de los J-79.
Fui a la sección del taller donde se recorría el controlador (entonces en IAI) y junto con su ingeniero investigamos varias docenas de controladores defectuosos que habían llegado para reparar. Al final de la investigación (mayo de 1979), redacté un informe que detallaba los hallazgos y recomendaciones para resolver los problemas descubiertos.
Al resumir el informe, argumenté que el controlador analógico adolece de problemas que, en mi opinión, no tienen posibilidad de solucionarse.
Recomendé desarrollar un nuevo controlador digital que incluyera dos canales de control idénticos (el antiguo controlador tenía un solo canal sin respaldo y como el Kfir es un avión monomotor, recomendé dos canales). Desafortunadamente, las FDI no actuaron para implementar las recomendaciones y el informe se incluyó en uno de los archivos y se olvidó.
En 1980 me asignan al puesto de Oficial de mantenimiento en la línea F-16.
Un día de 1982, dos personas que no conozco llegaron a la sección donde estábamos sentados. Vinieron a reunirse con un joven oficial de la tripulación F-16 que tenía un papel secundario, también a cargo de un avión Tsukit (una versión mejorada del Magister). El oficial llegó muy tarde a la reunión. Mientras tanto hablé con ellos y resultó que tienen una empresa en el país que desarrolló un controlador digital para el motor del avión Tsukit.
Durante nuestra conversación recordé el informe que había escrito 3 años antes sobre el controlador para el J-79. Tomé el informe olvidado y se lo entregué para que lo leyeran y les pedí su opinión. Después de una breve revisión me pidieron llevarlo a la empresa y revisarlo a fondo y por supuesto devolvérmelo.
Dos semanas después llamaron: ¡Queremos desarrollar el controlador digital que recomendó a nuestra costa! (Suponiendo que si tienen éxito, la IAA comprará su proyecto). No lo creí: hicieron un movimiento que no se me ocurrió en absoluto cuando les entregué el informe para su revisión.
En poco tiempo, la empresa inició un proceso de desarrollo en colaboración con la FDI, que duró varios años, al final del cual se desarrolló un controlador avanzado basado en computadora que incluye dos canales de control (el segundo para respaldo en caso de una falla en el primero).
La FDI adquirió el nuevo controlador y lo instaló en los motores de los aviones Kfir y Kurnas.
Con el correr de los años,el mismo controlador fue exportado a ocho Fuerzas Aérea, que utilizaban tanto F-4, como Kfir.
En 1984 soy destinado al proyecto Lavi y me encontré frente a la misma empresa (que desarrolló el controlador para el J-79) que ahora desarrollaba productos para el nuevo aparato de los cuales yo era responsable de la dirección.
En 1988, cuando me retiré de la Fuerza Aérea, me sorprendí cuando se me acercaron y me ofrecieron un trabajo en su compañía (supongo que por mi relación temprana conmigo).
Acepté y me quedé a trabajar con ellos hasta 2010. En mi trabajo en la empresa, fui socio en el desarrollo posterior del controlador como ingeniero de sistemas.
En 2004 fui enviado por la compañía a Corea del Sur, planificando la instalación del controlador en los motores J-79 de los Phantom de la Fuerza Aérea Coreana.
También instruí a los técnicos sobre cómo manejar el nuevo controlador. Esta fue la última actividad del proyecto que en realidad comenzó en 1978 en una reunión con la Fuerza Aérea Alemana.
Como parte de mi trabajo en la misma empresa, inicié una serie de proyectos adicionales para aviones F-16 y F-4 que se crearon con la misma idea en mente; reemplazar un sistema existente con un sistema mejorado, lo que aumentaría la confiabilidad y ahorraría costos de mantenimiento.
En total, los sistemas se instalaron en aeronaves de 26 fuerzas aéreas del mundo.
Principales diferencias entre el nuevo controlador de temperatura y el controlador original.
El controlador analógico original
El controlador original estaba basado en electrónica analógica básica, con componentes de la década de 1960. La estructura interna incluía cinco circuitos electrónicos, cada uno cubierto con un encapsulado sólido, que formaba un cubo opaco desde el cual se conectaban los cables al resto de los circuitos
La estructura interna del antiguo controlador
El inspector no tenía ni un sistema de autodiagnóstico ni un registro de fallas. La detección de fallas del motor solo era posible cuando un piloto o técnico detectaba un mal funcionamiento del motor en vuelo o en tierra. La verificación de fallas no fue posible a nivel Escuadrón y el controlador se enviaba al nivel 4 (en IAI), lo que aumentó el costo de mantenimiento y requería una gran cantidad de controladores de repuesto.
Localizar una falla en el controlador era complicado y largo, ya que los componentes internos no se podían verificar en ningún circuito electrónico (porque todos están cerrados en cubos sólidos). La única forma de encontrar fallas era reemplazar aleatoriamente uno de los bloques (lo que costaba varios miles de dólares). Si no se soluciona la falla, se reemplaza otro cubo y así sucesivamente hasta que se subsanaba la falla. Un método costoso e ineficiente.
En el caso de reemplazar el controlador del motor, fue necesario regular la temperatura del motor. Para ello, un técnico tenía que entrar durante el funcionamiento debajo del motor y realizar la regulación con un destornillador a través de una abertura en el controlador. Los datos del motor se podían leer en los indicadores de la cabina.
El nuevo controlador - DTCA (Amplificador de control de temperatura digital)
El nuevo controlador está montado en un motor J-79
El nuevo controlador se compone de electrónica digital avanzada y está controlado por una computadora (microprocesador). El controlador incluye 3 modernas tarjetas electrónicas.
Para verificar el funcionamiento del motor, se conecta una computadora portátil a un controlador a través de un cable de comunicación. Todos los datos del motor se muestran claramente en tiempo real en un monitor.
El controlador tiene un sistema de autoprueba que revisa los sistemas del controlador y el sistema del motor. En caso de mal funcionamiento, se registra inmediatamente en la memoria interna y se puede recuperar en la computadora externa y mostrar en la pantalla.
En caso de falla en el controlador, las tarjetas se pueden retirar en el laboratorio y cada componente se revisa por separado, y si se encuentra una falla, se puede reemplazar sin dañar la tarjeta. La solución de problemas es muy simple y rápida, por lo que el costo de mantenimiento es bajo.
El proceso de regulación de la temperatura del motor en marcha se realiza directamente en el calculador externo y no en el controlador (y sin tener que acercarse al motor como en el caso del controlador original). Para regular la temperatura, se usan las flechas en pantalla (flecha hacia arriba para aumentar la temperatura y flecha hacia abajo para disminuir). Simple y fácil de realizar.
Regulación de la temperatura del motor en la pantalla de la computadora











ujujuj
Que es lo que te divierte?ujujuj
No podría explicarlo en palabras
El marronesco de la fotos, un Kfir semi tapado con la lona, el sobrevuelo sobre esa especie de barrios prefabricados que hay allá, el exceso de insignia israelí en el Kfir sobrevolante, los seres trabajando apuradamente
No te voy a decir sabés?
ah ya lo hice
El marronesco de la fotos, un Kfir semi tapado con la lona, el sobrevuelo sobre esa especie de barrios prefabricados que hay allá, el exceso de insignia israelí en el Kfir sobrevolante, los seres trabajando apuradamente
No te voy a decir sabés?
ah ya lo hice
Y no te diste cuenta, que tiene el Escudo de la Unidad, censurado.No podría explicarlo en palabras
El marronesco de la fotos, un Kfir semi tapado con la lona, el sobrevuelo sobre esa especie de barrios prefabricados que hay allá, el exceso de insignia israelí en el Kfir sobrevolante, los seres trabajando apuradamente
No te voy a decir sabés?
ah ya lo hice
No no, es de la foto, es como un sello, fijate
Temas similares
- Respuestas
- 15
- Visitas
- 3K
- Respuestas
- 13
- Visitas
- 789
- Respuestas
- 2K
- Visitas
- 122K